
DSA-5:查找算法之向量实现
上一篇文章中介绍了向量的一般接口,这些接口大部分是为无序向量设计的。而这篇文章要讨论的的查找算法全都是为有序向量设计的。可以看到,对有序向量而言,因为多包含了“有序性”这一重要信息,向量中某一元素的查找操作的效率可以提高很多。
二分查找
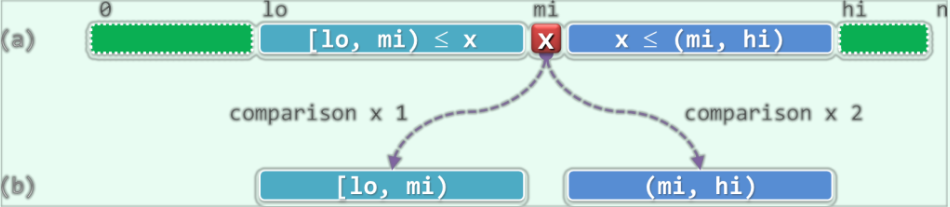
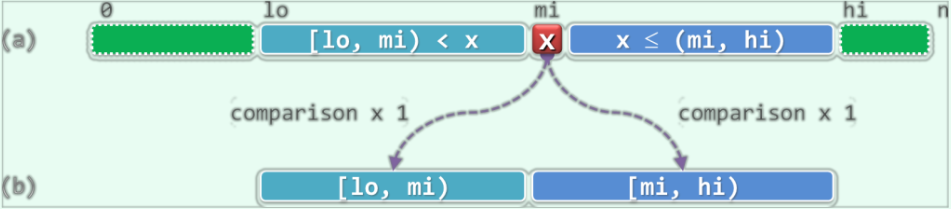
对于一个有序向量,以任一一个元素S[mi] = x为界,都可以将区间分为三个部分。并且由于向量是有序的,必然有:$\rm{S[lo, mi) \le S[mi] \le S(mi, hi)}$。于是,只需要将目标元$\rm e$与$\rm x$做一次比较,便可以视比较结果分为三种情况进一步处理:
- 若$\rm e < x$,则若$\rm e$存在,那么它必属于左侧子区间$\rm S[lo, mi)$,故可深入其中继续查找
- 若$\rm e > x$,则若$\rm e$存在,那么它必属于右侧子区间$\rm S(mi, hi)$,故也可深入其中继续查找
- 若$\rm e = x$,那么就找到了目标元素,查找终止
下面的图片展示了这个算法的基本思路:
经过至多两次比较操作,我们要么已经找到了目标元素,要么可以将原问题简化为一个规模更小的同类的新问题。看到这里,你应当很自然地想到使用递归的方法了。接下来要介绍的几个查找算法的不同点仅在于切分点mi的策略,以及每次深入递归之前所做的比较操作的次数。
为了便于使用,现为向量类设计了一个统一的查找算法的接口。在这个接口中,它会随机地调用不同的查找算法的函数。
1 | template <typename T> //在有序向量的区间[lo, hi)内,确定不大于e的最后一个节点的秩 |
二分查找(实现1)
实现
1 | template <typename T> static Rank binSearch ( T* S, T const& e, Rank lo, Rank hi ) { |
该算法以中点为界,将有序向量区间大致平均地分为前后两个子向量。另外,该算法使用了迭代的方法实现。(如果是以递归形式实现的话就是尾递归,可以改为迭代法实现。)
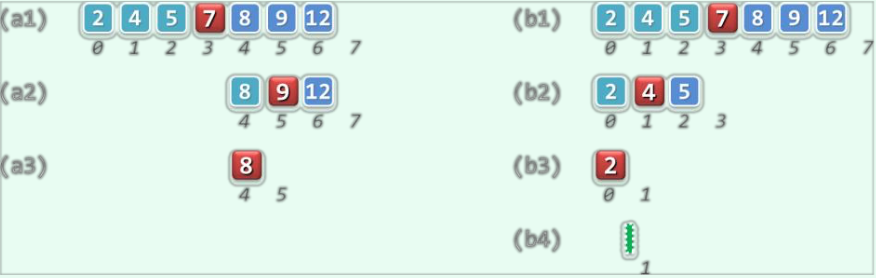
下图给出了上面的算法的一个实例,左边的子图为search(8, 0 ,7)右边的子图为search(3, 0, 7)。左子图查找成功,右子图查找失败。
复杂度
上面算法的实现策略可以概括为:以当前区间的居中元素作为目标元素的试探对象,因此每一步迭代之后无论沿着哪一个方向深入,新问题的规模都会减小一半。随着迭代的不断深入,目标查找区间的宽度以0.5的比例按几何级数的速度递减。于是经过至多$\log_2(\rm{hi - lo})$步迭代后,算法必然终止。又因为每一步迭代只需要常数时间,因此总体的时间复杂度为$\mathcal O(n)$。
查找长度
查找长度为查找算法中进行比较操作的次数。在查找算法中,每步迭代中的操作可以分为两种:元素的大小比较、秩的算数运算及其赋值。由于向量中存储的元素类型可能十分复杂,其比较操作可能会花费大量时间。因此在向量的查找算法中,元素的比较次数——也就是查找长素——是衡量算法性能的重要指标。
成功查找长度
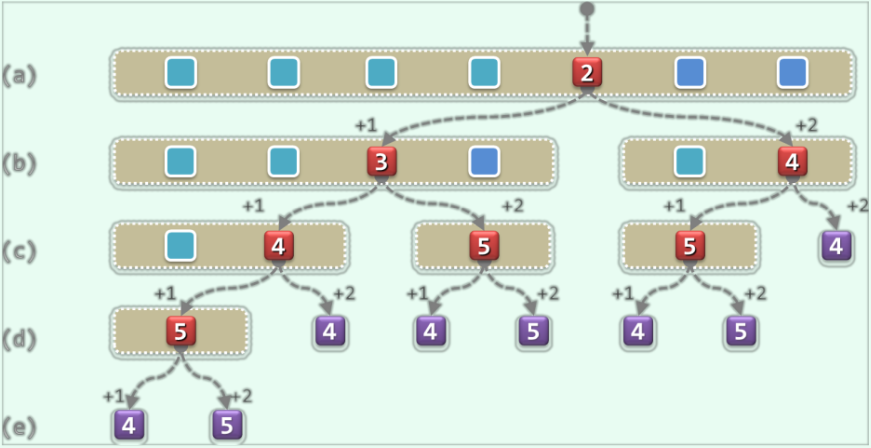
对于长度为$\rm n$的向量,共有种$\rm n$可能的查找。这些查找的种类分别对应于某一个元素。实际上,每一种成功查找所对应的查找长度,仅对应于$\rm n$与目标元素的秩(该元素在向量中的位置),而与向量中元素的值无关。下面的图片给出了当$\rm n = 7$时向量各种情况下对应的查找长度。图中红色节点代表查找成功,紫色节点代表查找失败,每个节点中的数字表示该情况下的查找长度。
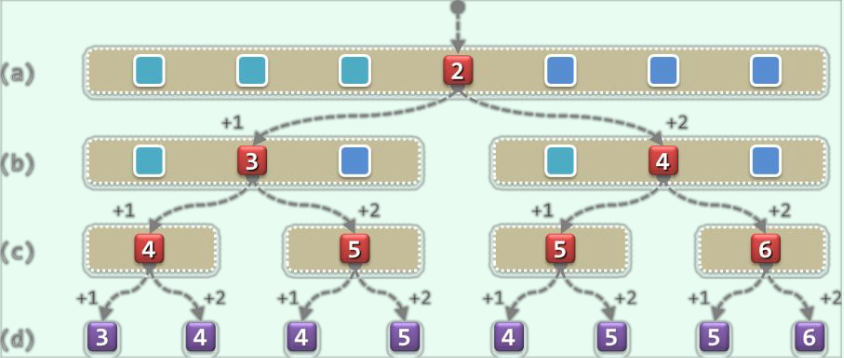
由图可知,假设待查找的目标元素等概率分布,平均成功查找长度为$(4 + 3 + 5 + 2 + 5 + 4 + 6) / 7 =4.14$。
为了估计出一般情况下的成功查找长度,仍在等概率条件下考察长度为$\rm{n = 2^k - 1}$的有序向量,所有元素对应的查找长素总和记为$\rm{C(k)}$,平均查找长度记为$c_{ave}$。
当$\rm k = 1$时,$\rm C(k) = 1$。当长度为$\rm 2^k - 1$时,有$\rm C(k) = [C(k - 1) + (2^{k-1} - 1)] + 2 + [C(k - 1) + 2(2^{k-1} - 1)] = 2C(k - 1) + 3\cdot 2^{k - 1} - 1$。
上面的公式中,左侧中括号内的$\rm C(k-1)$代表经过一次成功的比较(if(e < A[mi]))后,问题规模缩减为$\rm 2^{k - 1} - 1$。当向量规模为$\rm n = 2^k - 1$时,前缀中一共有$\rm 2^{k - 1} - 1$个元素。此时若目标元素在前缀中,那么无论在前缀中的哪个位置,他都已经经过一次比较了,之后要找到它至少也需要一次比较,这就是左侧中括号内$\rm 2^{k-1} - 1$的含义。
公式中,右侧中括号内的$\rm C(k-1)$代表经过一次失败的比较(if(e < A[mi]))与一次成功的比较(else if (A[mi < e]))后,问题规模缩减为$\rm 2^{k - 1} - 1$。当向量规模为$\rm n = 2^k - 1$时,后缀中一共有$\rm 2^{k - 1} - 1$个元素。此时若目标元素在后缀中,那么无论在后缀中的哪个位置,他都已经经过两次比较了,之后要找到它至少也需要两次比较,这就是左侧中括号内$\rm 2(2^{k-1} - 1)$的含义。
公式中的$2$很好理解,就是如果目标元素匹配了,就经过了两次失败的比较。
经过一系列的变换和推导,可以得出$\rm C(k) = (3k/2 - 1)\cdot (2^k - 1) + 3k/2$,进而得到$\rm c_{ave} = 3k/2 - 1 + 3k/(2\cdot (2^k - 1))$。
忽略$\rm c_{ave}$尾部的波动项,平均查找长度为$\mathcal O (1.5\rm{k}) = \mathcal O (1.5\cdot \log_2\rm n)$。
失败查找长度
失败查找长度不同于成功查找长度,只有在区间宽度缩减为0时,查找才失败。因此,失败查找的时间复杂度应该为$\Theta (logn)$。这里使用$\Theta$符号的原因是:失败查找的时间几乎是确定的,它不存在最坏和最好的情况,总是在$\log_2 n$附近。
不难发现,失败查找的可能情况总是比成功查找的可能情况多出一种。以上一小节给出的长度为7的向量为例,其失败查找长度为4.5。
仿照对平均成功查找长度的分析方法可以得出,一般情况下的平均失败查找长度也是$\mathcal O (1.5\cdot \log_2n)$。这里就不再分析了。
斐波那契查找
上述二分查找算法尽管在最坏情况下的效率可以达到$\mathcal O (logn)$,但是它还是存在着一些问题。以成功查找为例,即使是迭代(循环)次数相同的情况,各个元素对应的查找长度也不尽相同。这是因为在迭代中为了确定左右分支的方向,需要做1次到2次比较,从而造成不同情况下对应查找长度的不均衡,其中最短和最长分支所对应的查找长度相差约两倍。
为了解决上面的问题,有两种思路可以考虑:
- 调整前、后区域的宽度,适当加长前子向量并缩短后子向量
- 统一往两个方向深入所需要执行的比较次数
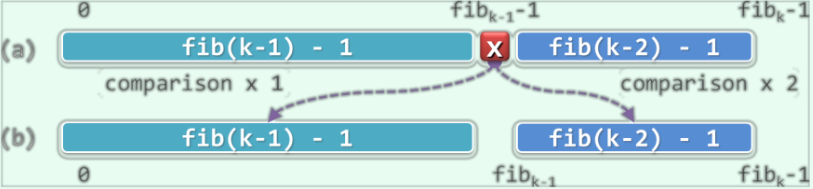
这里先考虑第一个解决思路。减而治之策略并不要求向量的切分点mi必须居中,在这里可以考虑按照黄金分割比例来确定mi。不妨假设向量的长度$\rm n = fib(k) - 1$,于是斐波那契查找算法可以用mi = fib(k - 1) - 1作为前、后子向量的切分点。这样一来,前后子向量的长度分别为$\rm fib(k - 1) - 1$与$\rm fib(k - 2) - 1 = (fib(k) - 1) - (fib(k - 1) - 1) - 1$。由此,无论朝哪个方向深入,新向量的长度从形式上都依然是某个斐波那契数减1,就像下图一样:
实现
1 |
|
斐波那契查找算法的主体框架与二分查找大致相同。主要区别在于使用黄金分割点取代中点作为切分点。为此需要借助Fib对象来获取斐波那契数列,这里获取的fib(hi - lo)为大小不小于向量中元素个数的斐波那契数。代码第6行的作用是根据fib(k)找到fib(k - 1)。如果hi - lo小于fib当前指向的值,则将fib前移一个,直到fib指向的值在$\rm [lo , hi)$之间。
性能分析
斐波那契查找倾向于适当加长需要1次比较方可确定的前端子向量,缩短需要2次比较方可以确定的后端子向量。通过这种方式来减小不同元素查找长度的差异。
以上图为例,在假定各元素出现概率相等时,则平均成功查找长度为4,平均失败查找长度为4.38。相比于二分查找(实现1)中的平均查找长度的确有所改进。可以证明,斐波那契查找的平均查找长度为$\mathcal O (1.44\log_2n)$。
二分查找(实现2)
现在来讨论第二种缩小前后查找长度不均衡的策略:统一往两个方向深入所需要执行的比较次数。在这个版本的二分查找算法中,无论朝哪个方向的子向量深入查找,都只需要做1次元素的大小比较。具体过程如下图所示:
如图所示,该算法在每个切分点A[mi]处仅做一次比较。若目标元素小于A[mi],则深入前端子向量A[lo, mi)中继续查找;否则深入后端子向量A[mi, hi)中继续查找。
实现
1 | // 二分查找算法(版本B):在有序向量的区间[lo, hi)内查找元素e,0 <= lo < hi <= _size |
该版本的二分查找算法只有等到区间的宽度缩小为1(只剩最后一个元素)时迭代才会终止。哪怕在第一步迭代中就已经匹配到了目标元素,也得继续进行迭代,调整区间端点,直到区间中只剩一个元素。最后,再对这剩下的最后一个元素进行一次比较来判断查找是否成功。
性能分析
显然,该算法的渐进复杂度为$\mathcal O (logn)$。由于无论如何只有在区间中只有一个元素时迭代才会停止,因此最好情况下的效率会有所倒退。但是作为补偿,最坏情况下的效率也会有所提高(最长的查找长度相比于“实现1”中缩短1倍)。无论是成功查找还是失败查找,该版本的二分查找算法中各分支的查找长度都更加接近,故整体性能更加稳定。
二分查找(实现3)
二分查找(实现2)仍有可以改进之处:比如它在返回匹配成功的元素时,若有重复的多个匹配元素,它只能在这些元素中“随机”地报告其中一个(并不是真的随机,这个跟mi的选取方法有关);此外,在查找失败的时候,该算法也只能简单地返回一个-1。
对二分查找(实现2)的代码进行一些改进便可改进上述缺点。
实现
1 | // 二分查找算法(版本C):在有序向量的区间[lo, hi)内查找元素e,0 <= lo <= hi <= _size |
这个版本的二分查找算法是在当区间的长度缩减为0时才停止迭代,此外在每次转入后端分支时,子向量的左边界取作mi + 1而不是mi。这样做的理由是:**$\rm A[0, lo)$中的元素小于等于$\rm e$,$\rm A[hi, n)$中的元素均大于$\rm e$**。使用数学归纳法可以证明该命题。
首次迭代时,lo = 0,hi = n,因此$\rm A[0, lo)$与$\rm A[hi, n)$均为空,命题成立。
考察在某次迭代中的情况。如果$\rm e < A[mi]$,则令hi = mi,这使得$\rm A[hi, n)$向左扩展,该区间内的元素仍然都大于$\rm e$。如果$\rm e \ge A[mi]$,则令lo = mi + 1,这使得$\rm A[0, lo)$向右扩展,该区间内的元素仍然小于等于$\rm e$。在循环终止时有lo = hi,考察A[lo - 1]和A[lo]:作为$\rm A[0, lo)$中的最后一个元素,A[lo - 1]必然不大于$\rm e$;作为$\rm A[hi, n)$中的第一个元素,A[lo]一定大于$\rm e$。所以此时A[lo - 1]就是原向量中不大于$\rm e$的最后一个元素,因此算法只用返回lo - 1。
下面的图片解释了该算法的思路:
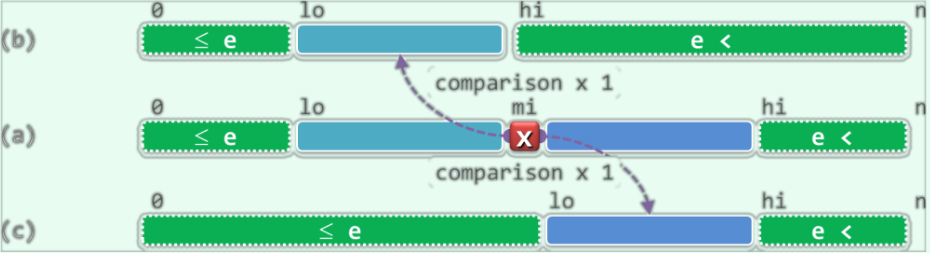
可见,这个版本的二分查找算法在查找成功时,(若有多个匹配元素)会返回众多匹配元素的最后一个;在查找失败时,会返回向量中小于目标元素的各元素中的最大者。
DSA-5:查找算法之向量实现